 | Overall hovercraft. This has the skirt, decks, and superstructure all assembled. However, the rudders are currently held on by clamps, as the upper supports will not be glued until after the craft is painted, in the interest of a good bonding surface. |
 | Testing out the rudders, with the fan running at medium speed. The rudders give a good amount of force when pushed into the airstream, so the craft should handle well. |
 | Looking at the aft side of the thrust fan and rudders. |
 | Gluing the rudder servo mounts. |
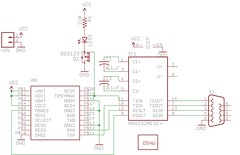 | Schematic for the GPS breakout, which takes my ET-102 v2.0 GPS engine bord and converts the four (TX, RX, PPS, and Reset) TTL-level signals to RS232-level. PPS will be used on DCD to maintain a local authoritative NTP server for accurate timestamps, while Reset is tied to DTR in case the xM needs to reset the GPS for any reason. |
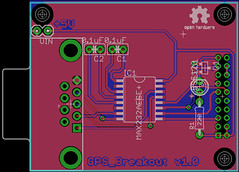 | Board layout for the GPS breakout. The LED indicates the PPS signal, and ought to blink at exactly 1Hz. |
Video on YouTube
I bet it would handle the grass on full power if you put the battery in back so it was pulling the weight over the grass rather than pushing it.
ReplyDeleteHe did say it was unbalanced though, and I'm sure if you fixed it Lego it would work nicely. You working on this at Tech or you down in the L.P. this summer working?
ReplyDeleteI suspect that your lift prop is just too open, only having two blades. It's not doing enough to capture the air and create positive pressure under the craft. Most hovercraft I recall seeing have somewhere between 40-60% coverage, where you appear to be lucky to have 10%.
ReplyDelete@neakynor: Rochester Hills for the summer.
ReplyDelete@Dark-Fx: That is actually a good idea, I will look into that.